All of the Team Paradox competition robots are designed and constructed in our high school machine shop on campus at San Dieguito Academy.
2023 Updraft | FIRST Charged Up

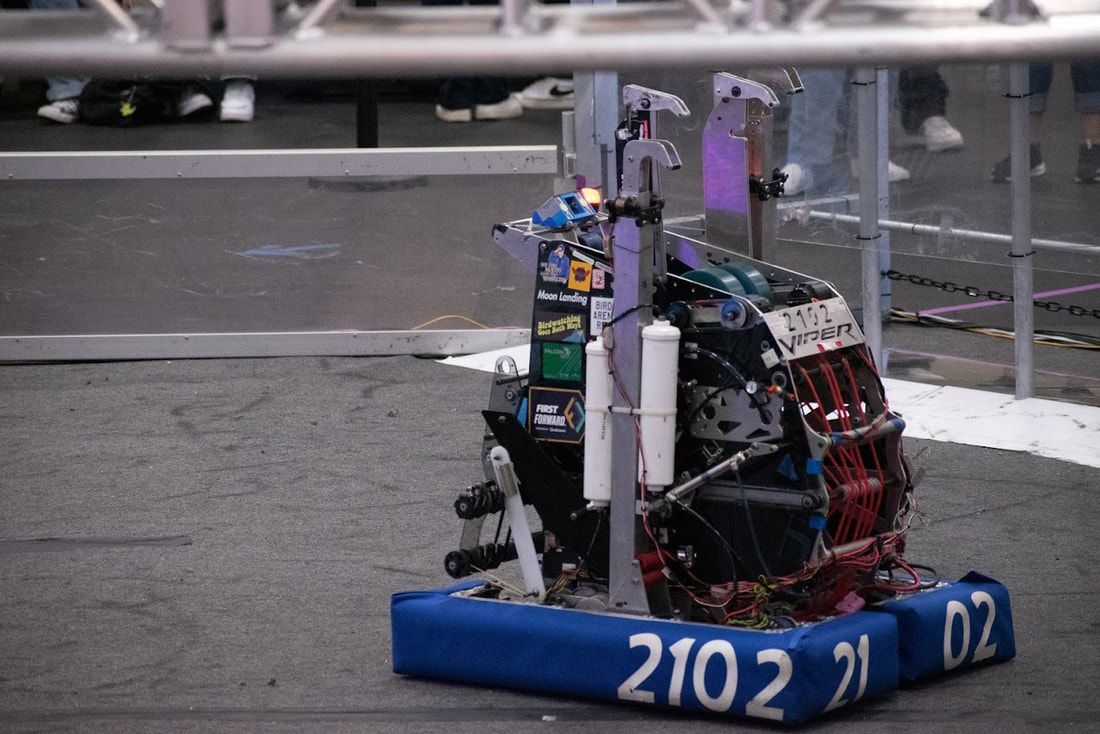
2022 Viper | FIRST Rapid React
|
2021 OREO | FIRST Infinite Recharge at Home
2020 Orion | FIRST Infinite Recharge
2019 Flip | FIRST Destination: Deep Space
2018 Lambda | FIRST Power Up
2017: Artemis | FIRST Steamworks
2016: Sir Angus Macaw (SAM) | FIRST Stronghold
2015: Big Red / GIL / 2CHAINZ | FIRST Recycle Rush

|
In Recycle Rush, teams needed to build a robot that stacked totes (storage containers) and put a recycle bin on top of it for a multiple of points. Putting litter (pool noodles) in the trash can and then stacking it on a stack of totes also gave an added multiple of points. In 2015, robot alliances had no physical robot interaction and were not directly competing but trying to get the highest score to boost their match average points to determine their ranking. Gil brought us up to fourth seed in both the Madera and San Diego regional where we won the 2nd seed alliance and were captains of the 3rd seed alliance respectively. In Madera, we made it to the finals, while in San Diego we got into the semifinals. Our robot won the Quality Award and gave us the best performance we ever had to date.
|
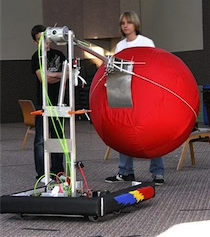
2014: MR. SNACKY | FIRST AERIAL ASSIST

|
In Aerial Assist standard alliances competed against each other to score 2 foot in diameter exercise balls into goals on the opposite side of the field. Robots alliances could score extra points by passing the balls to other robots on their alliance and shooting the ball over the bar “truss” in the center of the field. Mr. Snacky's skills on the field got us picked to be on alliances in both our San Diego and Las Vegas regionals, letting us compete in the quarter finals.
|
2013: WOODSTOCK | FIRST ULTIMATE ASCENT
|
In Ultimate Ascent, alliances went head to head in attempting to shoot frisbees into goals on the opposite side of the field. In an endgame robots had to climb a multi-level pyramid on their side of the field, scoring more points depending on how high up they climbed. Mr. Snacky's skills on the field got us picked to be on alliances in both our San Diego and Las Vegas regionals letting us compete in the quarter finals.
|
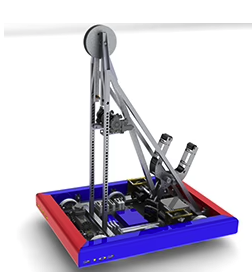
2012: TERRENCE | FIRST REBOUND RUMBLE
|
Following Buttercup’s faults, Terrence was designed with simplicity at heart. We still sought to accomplish all of the tasks at hand, but with much simpler mechanisms. Terrence performed very admirably. All team members were surprised by the lack of activity in the pits. No drive train was replaced, the tower did not crack into two, and with the exception of the occasional lost nut, the robot held together. We still lack slightly in speed of tube delivery, but make up for it in maneuverability.
|
2011: RINZLER | FIRST LOGO MOTION

|
Rinzler is the second component of the main robot, a mini-robot designed and built to play LOGOMOTION. The mini-bot has to deploy in the final ten seconds of the match, climb a ten foot pole, and trigger a pressure plate. The strategy in its design was that reliability in deployment was just as important as the speed of climbing the tower. Between its considerable speed and reliable deployment system, Rinzler was able to make more first place runs in the qualifying rounds than any mini-bot at the competition. With the exception of a few minor bumps and scratches there were no complications with the performance.
|
2010: DR. HIPSTER | FIRST BREAKAWAY

|
This was the lets do everything and beat everyone robot. Our game strategy was naïve and over-ambitious. We designed a robot that could suck in the soccer balls, maneuver freely using Mecanum drive wheels, kick the soccer balls the distance of the field, and raise up onto the alliance tower. As it turns out, it is very difficult to accomplish everything. Nothing on this robot went unchanged from San Diego to Atlanta. We learned our lesson, simplicity is important.
|
2009: BUTTERCUP AND "BETTERCUP" | FIRST LUNACY
|
Our game strategy emphasized maneuverability utilizing a modified swerve “skid” drive-train. The drive-train had front and back steering, with left and right drive. The driver had the option of several different control methods to best fit the current match situation. With a rotating turret and vertical holding chute, this robot was designed to get the “moon rocks” quickly from the ground to the opponents. This robot performed admirably, and as a team we were conservatively pleased with its functionality. However with that said, this robot contained completely too many disposable parts; the orange bands, the turret Velcro™, the friction drive to mention a few.
|
2008: BEASLEY | FIRST OVERDRIVE
|
As it turns out, our hurdling device was incurring huge penalties during competition, so we had to remove it. Even without the ability to hurdle, it performed amazingly. We were one of the top lapbots, making it around the track up to 8 times per match. The transmissions had a few issues, but other than that the performance was golden.
|
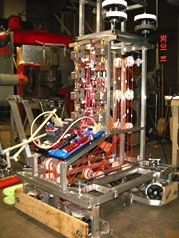
2007: MR. FRITZ | FIRST RACK N' ROLL

|
In our initial design, we stressed the ability to reach all three levels of racks, and high maneuverability. In the end, we accomplished this, but did not take into effect how important speed would be in the final game. Another thing we failed to think about was that although the higher legs are harder to get to, they are still worth the same amount of points, making them really not worth the effort. The performance in the competition was exactly as we had expected, the four drive wheels arranged around the mast gave us huge maneuverability, and made us a formidable defensive robot. However, the carriage moved up and down the mast painfully slow, and the casters made it easy to push us around. The mast also made us top heavy, and easy to knock over.
|